
Wat is modulatie?
Modulatie kan het beste worden beschreven als het aanpassen van een hoogfrequente sinusgolf (de carrier) in functie van de waarde van een modulerend signaal.
Verschilende vormen van modulatie
- het aanpassen van de amplitude (Amplitude Modulatie)
- het aanpassen van de frequentie (Frequentie Modulatie)
- het aanpassen van de fasehoek (Fase Modulatie).
Waarom moduleren?
De reden dat we moduleren is omdat we een bepaald signaal willen doorsturen. Voor elke frequentie is een andere antennelengte nodig. Zo is bij 20 Hz 7500 kilometer nodig en bij 20 kHz zo’n 7.5 kilometer. Dit is zeer onpraktisch en simpelweg niet mogelijk. Ga je aan 1 kHz uitzenden zullen je een constante pieptoon horen. Met modulatie vershuiven we als het ware op in frequentie om zo tot een frequentie te komen die wel werkbaar is. Modulatie is dus nodig om zender en ontvanger op een correcte wijze te kunnen laten communiceren.
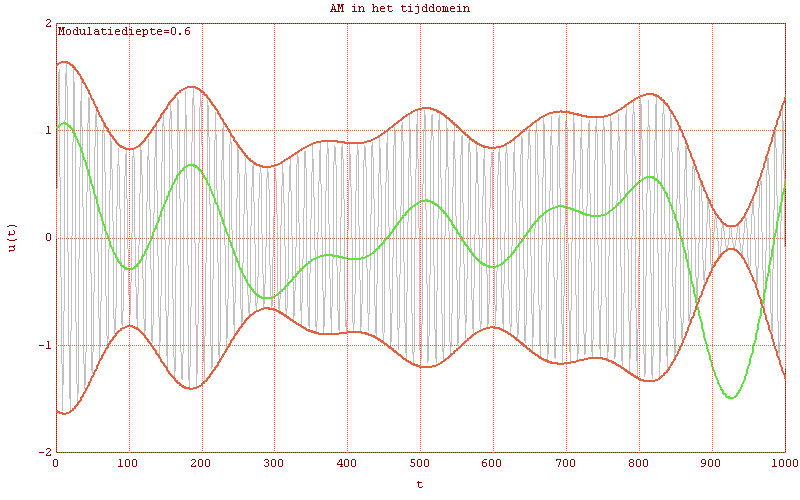
AM of amplitude modulatie
Dit is de eerste vorm die gebruikt werd bij RC zenders en ontvangers. Door de amplitude te veranderen van de carier op een bepaalde frequentie krijgt de ontvanger instructies. De amplitude is in feite de grootte van het signaal. Helaas is deze vorm ook erg storingsgevoelig door allerlei elektrische signalen. Het is hier eigenlijk vrijwel altijd af te raden om nog een AM zender te gebruiken.
FM of frequentie modulatie
Deze modulatie vorm is een stuk minder storingsgevoelig omdat er wordt gekeken naar wijzigingen in de frequentie en niet in de amplitude. De frequentie verandering bedraagt telkens zo’n 2,5KHz Ook deze vorm van modulatie is nog steeds niet storingsvrij en je kunt last krijgen van zogenaamde ‘glitches’. Korte onderbrekingen van het goede signaal doordat er een storing is en de ontvanger deze interpreteert als een echt signaal van de zender.
PPM modulatie
PPM is de eenvoudigste vorm van sturing met pulsen en staat voor Pulse Position Modulation of Puls Positie Modulatie. PPM werkt met vaste pulses en verschuivingen in fase. De fase staat voor de tijdsduur tussen de pulsen. De ontvanger zal dus een reeks pulsen snel achter elkaar krijgen met daarna een korte pauze. Een pulse is simpelweg wel of geen volt. Samen met de variatie in de fase ontstaat vervolgens een signaal waarmee een servo naar links, naar rechts of in neutraal stand kan worden gebracht. Het probleem met deze vorm van modulatie is dat wanneer er extra pulsjes tussendoor komen de interne teller van de ontvanger niet meer ziet wanneer een nieuwe informatie reeks begint en wanneer de vorige eindigde, op dit moment heb je dus storing.
PCM modulatie
Pulscodemodulatie is een stuk ingewikkelder dan PPM. Dit maakt de zenders en ontvangers meteen ook gecompliceerder en daarom vaak duurder, groter en iets zwaarder. PCM werkt door een stuursignaal om te zetten in een getal van 0 tot 1024. Dit getal wordt vervolgens omgezet in bits (ééntjes en nulletjes). Deze bits worden naar de ontvanger gestuurd door de zendfrequentie te varieren. Het PCM systeem heeft minder last van storingen omdat het het getal kan interpreteren en weet of dit een echt signaal is of een storing. Dus hoewel de ontvanger nog steeds andere signalen zal binnenkrijgen is de ontvanger nu in staat om deze foutieve signalen er uit te filteren. Theoretisch gezien zou een servo met PCM dus ook in 1024 verschillende standen gepositioneerd kunnen worden echter gaan er een aantal bits verloren voor de communicatie en eventuele foutcorrectie.
Samenvatting PPM en PCM
Een groot misverstand is dat er naast AM en FM zenders en ontvangers nog andere zenders zijn zoals PPM en PCM zenders. In werkelijkheid is het echter zo dat een PCM of PPM zender nog steeds een FM zender kan zijn. PPM en PCM zijn simpelweg 2 manieren om een signaal te vormen.
Het is duidelijk dat PCM een stuk minder storingsgevoelig is dan PPM. Hoe wel de prijs van PCM zenders en ontvangers dus iets hoger ligt is dit de prijs zeker waard.









